 |
|
 |
| |
小车走黑线 |
||||||
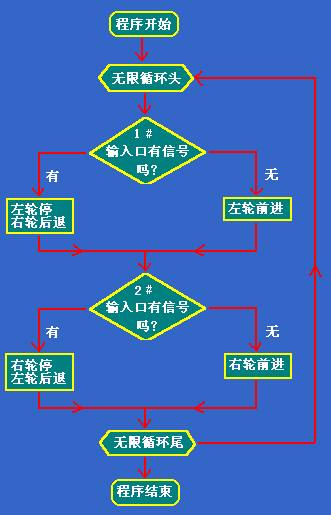
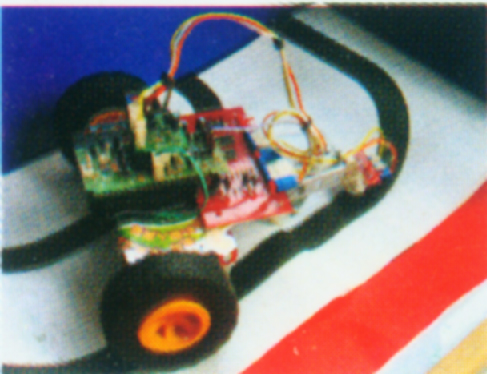
| 要求:智能车能够沿黑线先进。 |
||||||
| 设计思路:首先我们必须解决如何探测黑线问题,根据前面扩展板介绍,厂家提供了“光反射传感器”,用它可以作为黑线控测器,当光反射头外在黑线上时,黑线不反光,电脑收不到信号,当光反射头到了黑线外边白色地带,光反射传感器就能接受到光,电脑主板也就能采集到信号,这就达到探测黑线问题。 接着我们应该考虑用几个光反射头的传器呢?如果采用一个光反射头虽然可以判智能车是否在黑线上,但是无法判断偏左还是偏右,如果我们采用2个光反射头,就可以方便地用它来判断智能小车是否处在黑线左边还是跑到黑线右边去了。 |
||||||
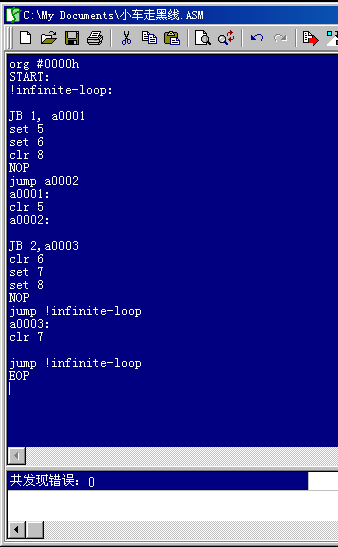
| 这次我们通过流程图,直接编写程序,然后下载。 | ||||||
|
|
|
| Copyright
2004~2015 广州市星梭电子科技有限公司(www.sunshow.net.cn ) 网站备案号: 粤ICP备08013491号-1 , 粤ICP备05093682号, 粤ICP备08013491号
|